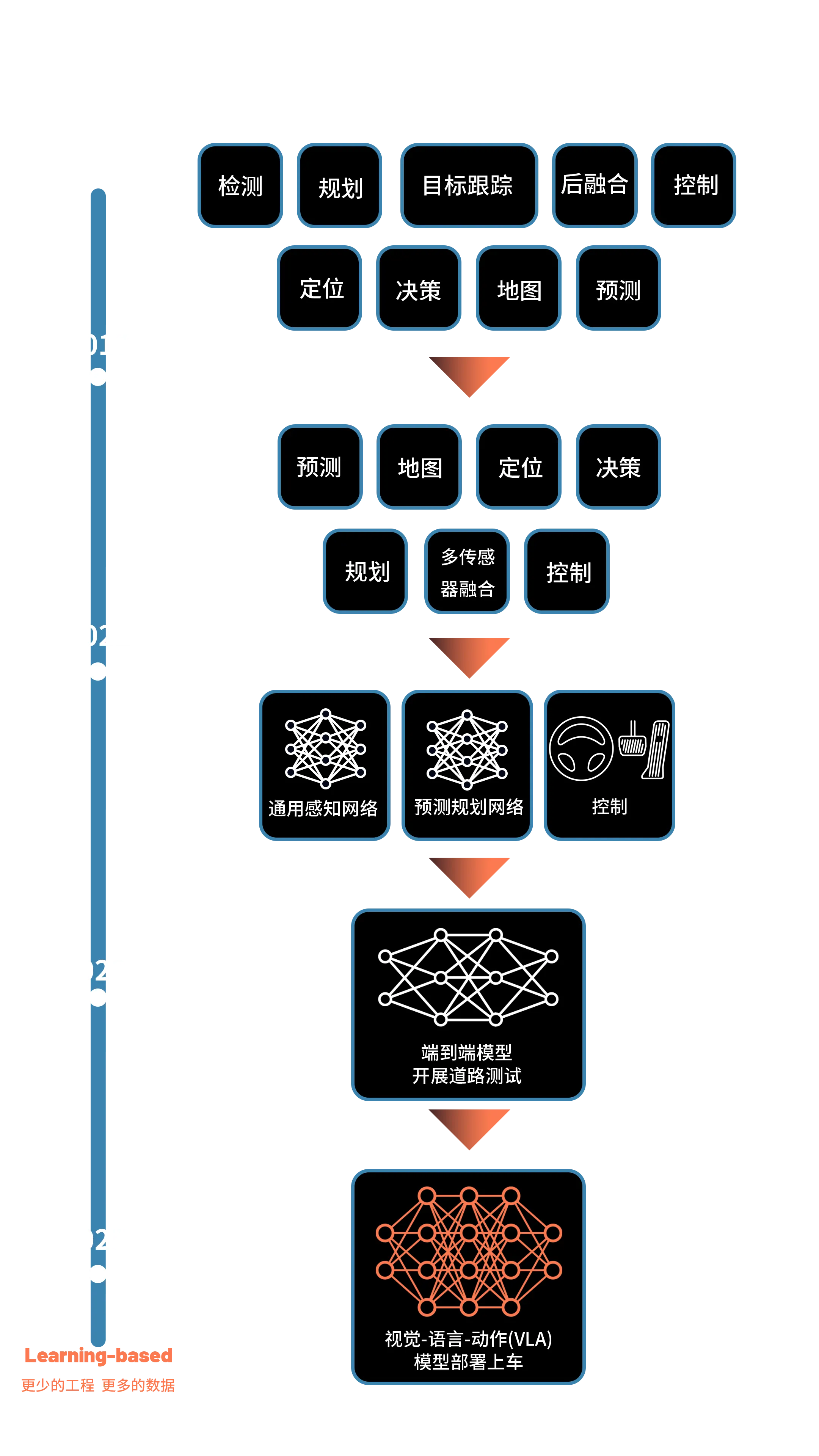



从多模块走向端到端融合
-
检测
-
目标
跟踪 -
后融合
-
预测
-
决策
-
规划
-
控制
-
地图
-
定位

-
预测
-
地图
-
定位
-
决策
-
规划
-
多传感
器融合 -
控制

通用感知网络

预测规划网络
控制
端到端模型
开展道路测试
视觉-语言-动作(VLA)
模型部署上车
Rule-based
更多的工程 适量的数据
- 2017
- 2022
- 2023
- 2025
Learning-based
更少的工程 更多的数据